低成本实现一个蓝牙触摸板
使用 ESP32 和 Synaptics TM2334 触摸板
前言
我个人很喜欢小型化的设备,包括小键盘小鼠标小掌机小萝莉之类的。我前段时间找到了目前最小的剪刀脚键盘,很小,只有 7 寸,但是甚至有背光:

我挺喜欢这个键盘的,但是这个键盘有个缺点,就是还是太大了,虽然厚度不到 5mm,但是如图所示,前后还是留有不少的无效空间,而且如果再有个触摸板就好了。所以我就开始筹划怎么搞。由于这个键盘还能用,先不糟蹋了,买个触摸板,先搞触摸板吧。于是我打开 tb,找到了目前来说最便宜的触摸板,TM2334,算上邮费只要 16 块钱。这是用在 12、13 年联想 S41 笔记本上的触摸板,本身支持多点触控,手感也很好:


下一步就是要搞懂触摸板是怎么工作的。
竟然是 PS/2
拿到触摸板,由于是商用化产品,不是什么模块之类的,所以文档你是别想了,先查查这个型号有没有人搞过吧。结果一查,还真有:
https://forum.level1techs.com/t/touchpad-ps-2-pinout-help/139088
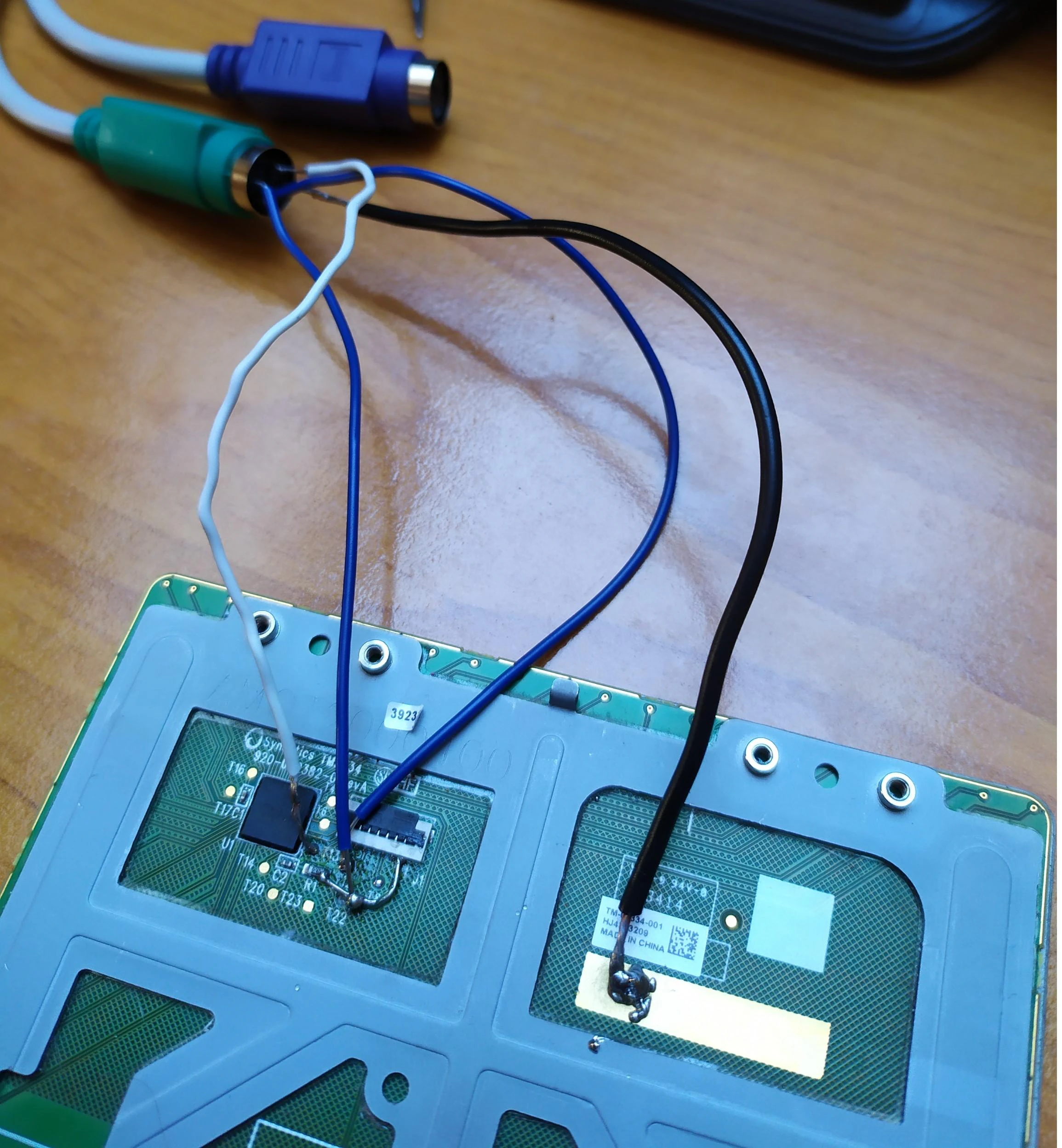
我最先查到的是这一篇帖子,上面详细的介绍了他想让这个触摸板作为一个 PS/2 设备工作,他连接了几个测试点位,但是还是无法通过纯 PS/2 方法驱动:
还有一个帖子的老哥直接给出了排线定义,也是焊接到了 PS/2 座子上,但是无法驱动:
https://www.eevblog.com/forum/projects/usb-touchpad-synaptics-tm2334/
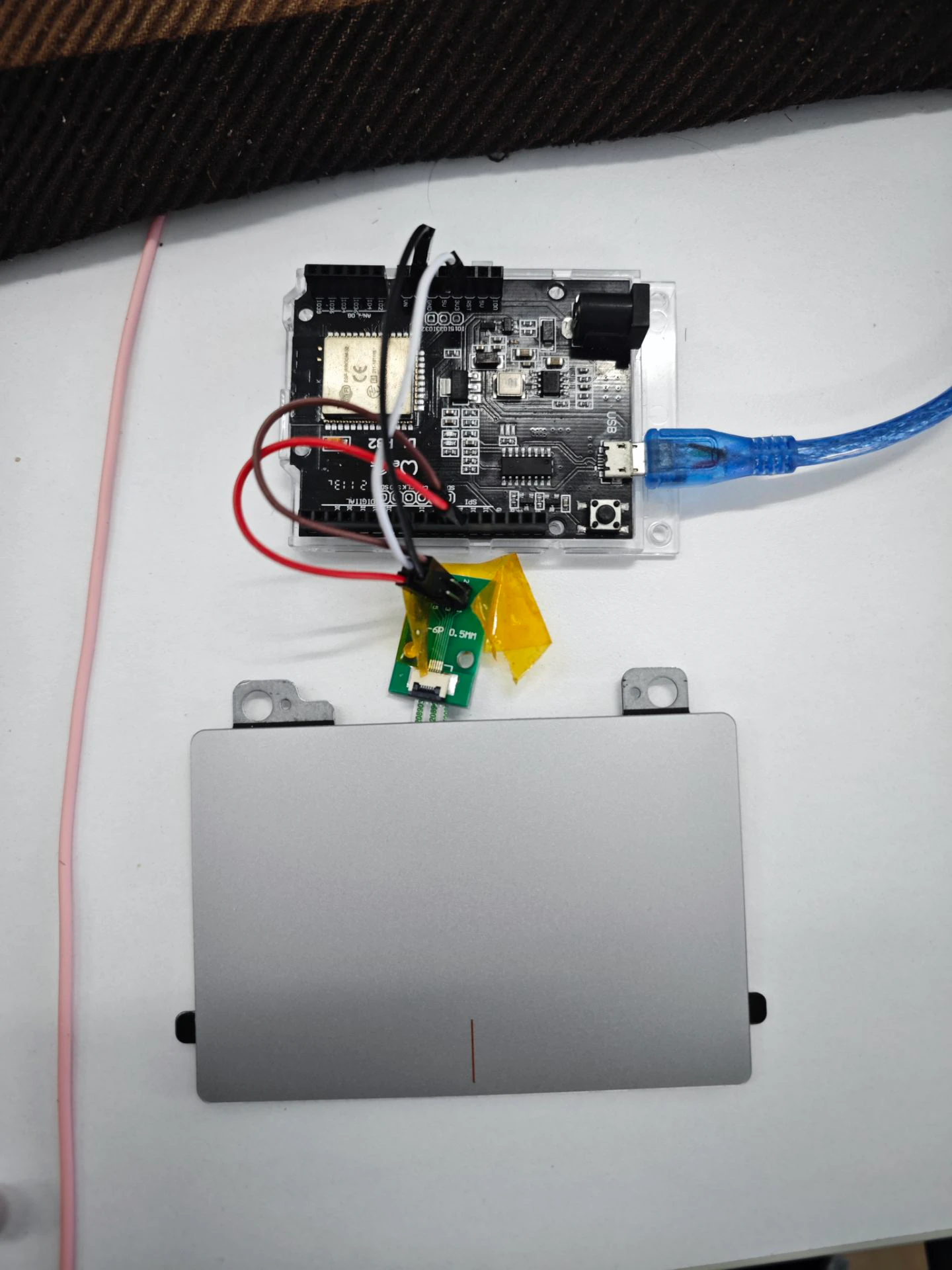
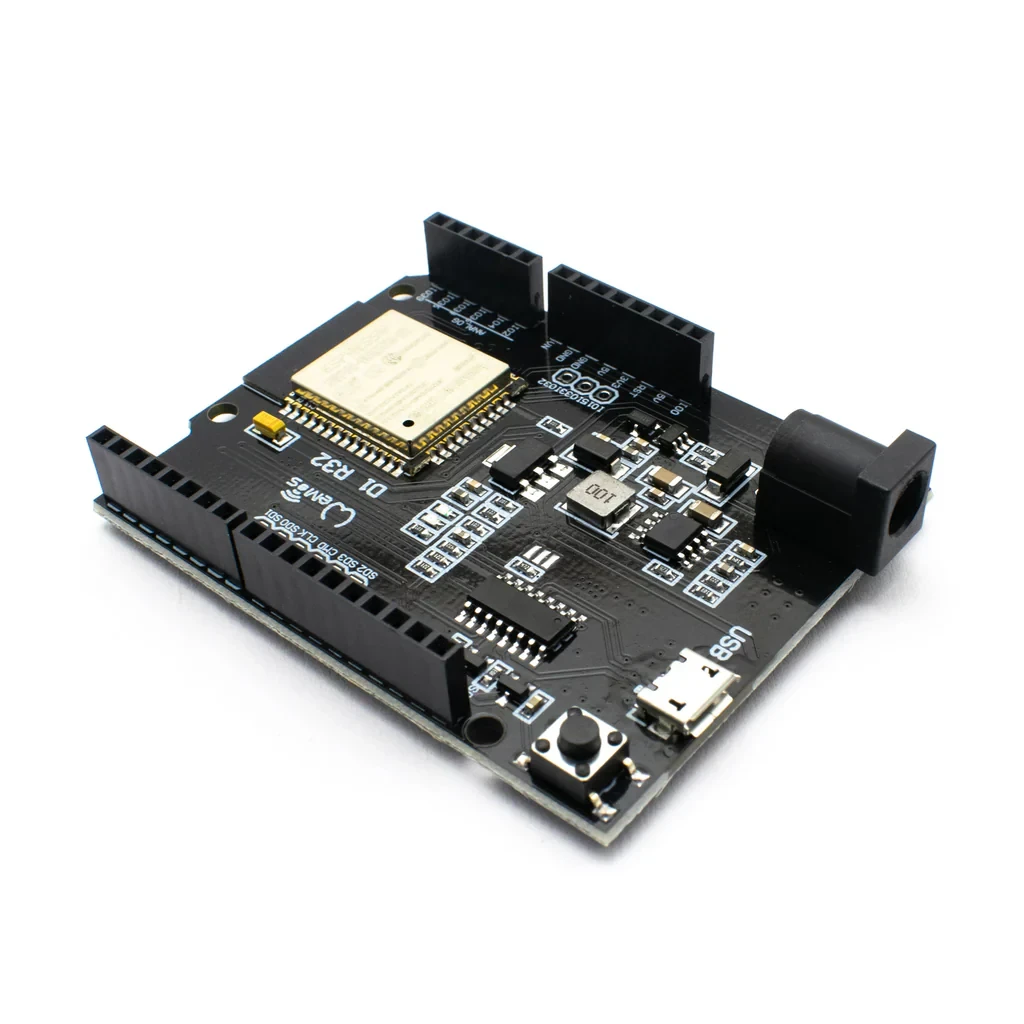
这个老哥很执拗,坚定的认为只有能直接用 PS/2 驱动才行,而我们不太一样,我们还是想通过蓝牙来进行通信的,所以可以不受这些东西的限制。我翻出了之前毕业设计的时候白嫖的舍友的 D1 R32,这个开发板长得和 Arduino UNO 差不多,但是主控是 ESP32,双核处理器,240MHz 的频率,支持连接 WiFi 和蓝牙,性能非常强劲,拿来开发正好:
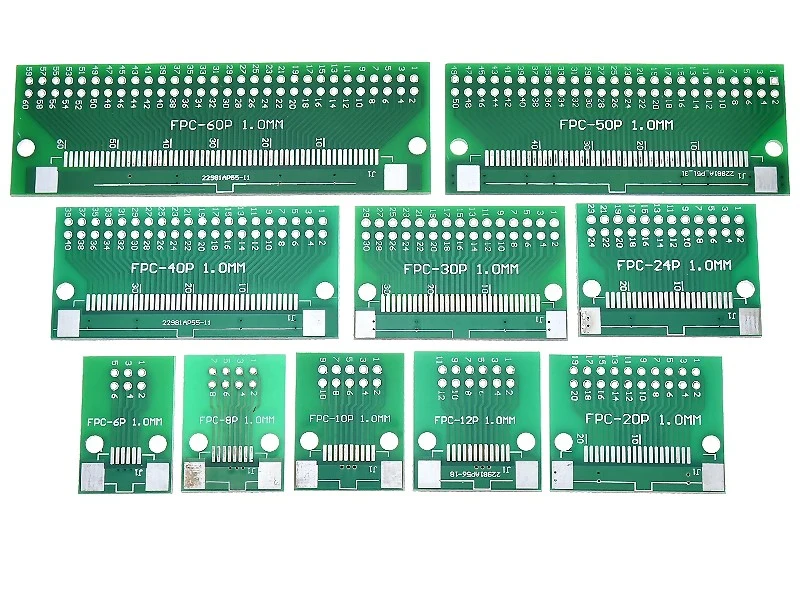
要连接触摸板,我们不用像国外老哥这么粗犷,直接买个 6 针的 FPC 连接座就行了,我第一次的时候没经验,看到有 0.5 和 1.0 的,还以为的后面孔的间距,还想着买这么宽干啥,0.5 的就行了,没想到是排线的宽度,触摸板正好还用的是 1.0 的排线,好在这个连接座正面是 0.5,反面就是 1.0,再买个 1.0 的座焊上就行了,很简单,总算是没浪费。

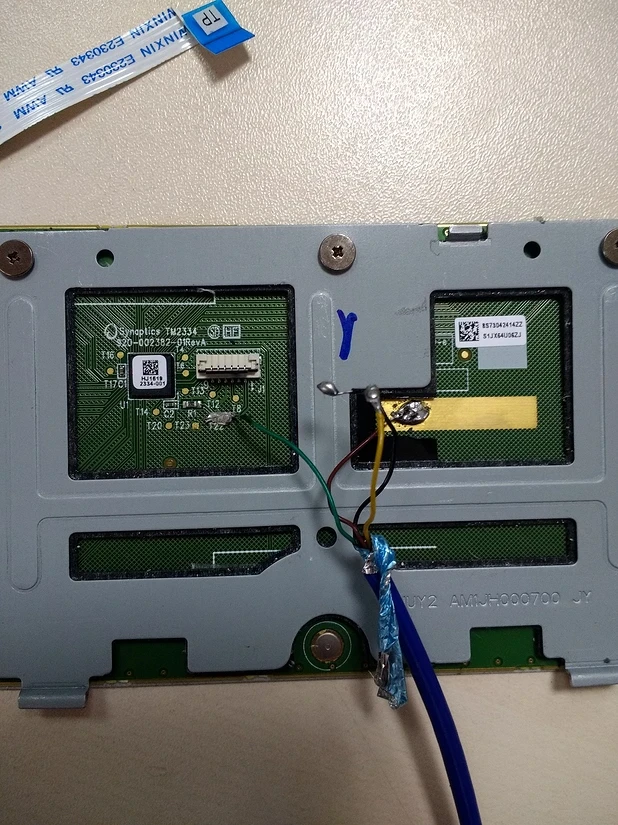
根据之前帖子里老哥给的定义,我们知道了排线的定义:
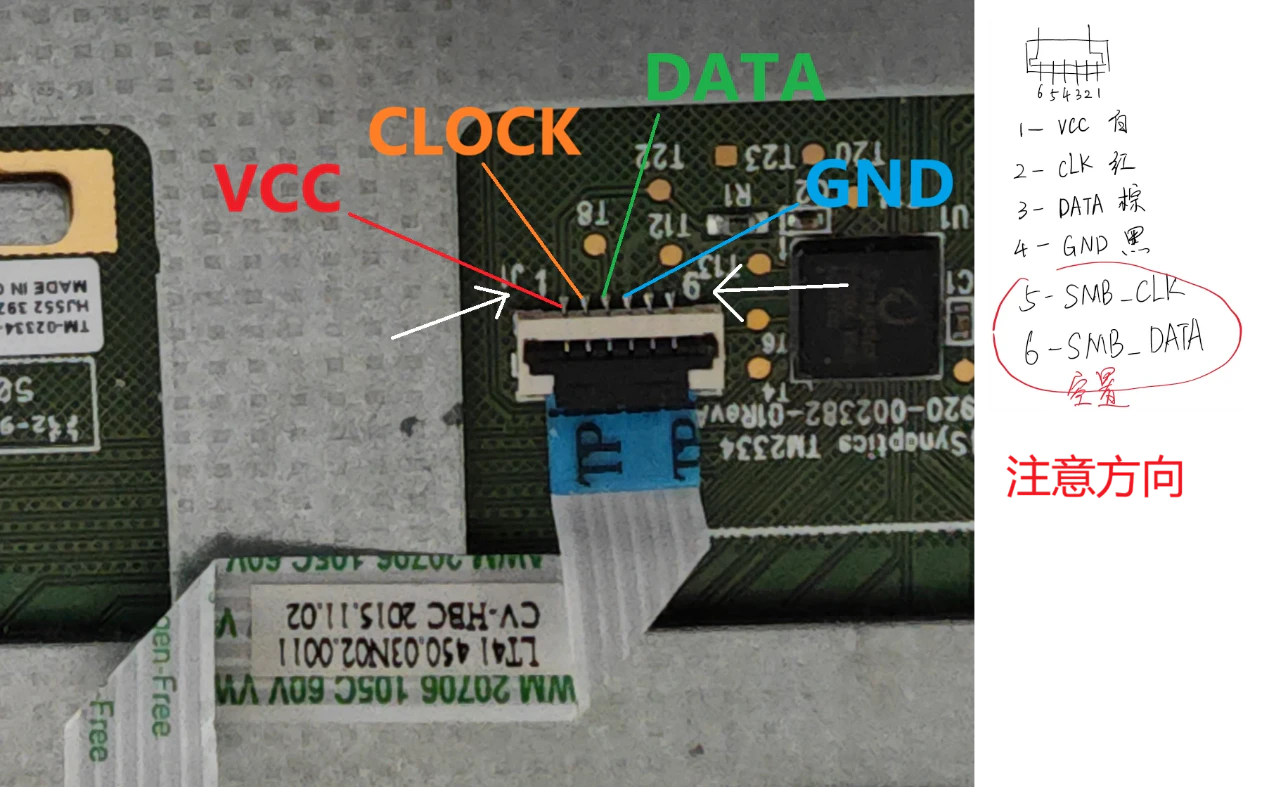
- +3VS: 这是 3V 电源引脚,表示为“+3 Volt Supply”。它为相关电路(如触控板)提供电源。
- TP_CLK (Touchpad Clock): 这是触控板的时钟信号引脚。时钟信号在传输过程中用于同步数据的发送和接收。
- TP_DATA (Touchpad Data): 这是触控板的数据传输引脚,负责传输触控板与主控器之间的数据。
- GND: 接地引脚,提供电气回路的参考点。所有电流都会回流到这个引脚。
- SMB_CLK (SMBus Clock): 这是系统管理总线(SMBus)的时钟引脚。SMBus 用于与低带宽的设备通信,如电池或传感器。
- SMB_DATA (SMBus Data): 这是系统管理总线的数据引脚,用于在 SMBus 设备之间传输数据。
一定要注意方向,注意看上面标出的 1 和 6。5 和 6 是电脑主板用的,我们用不到,而且大家注意,不是每个触摸板的引脚定义都是这个,如果要随便买个触摸板来改装,需要自己去网上找找资料。
PS/2 的二三事
首先我们要先了解一些 PS/2 的基础知识,一个标准的 PS/2 座子是这样的
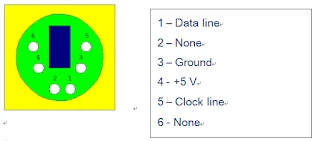
电源和地线不用说,**时钟线(CLK),**用于同步数据传输;根据需要由设备或主机控制。数据线(DATA):在主机和设备之间传输数据位。当 PS/2 设备处于闲置状态的时候,时钟和数据引脚全部拉高。当主机想要给设备发送数据时,拉低 CLK 和 DATA,表示请求发送数据。设备到主机只需要控制 CLK 就可以发送数据了。所以我们可以把中断附加到时钟引脚,下降沿触发读取信号就可以实现对 PS/2 设备的信号读取了。
PS/2 数据帧是这样的:

-
起始位:始终为 0(LOW)。
-
数据位:8 位,最低有效位(LSB)先发送。
-
奇偶校验位(Parity,P):确保奇校验(1 的总数为奇数)。
-
停止位:始终为 1(HIGH)。
知道了数据的读取方式,下一步就是如何初始化一个 Synaptics 触摸板了。
Synaptics,启动!
其实,如果你只使用 PS/2 的标准协议也是能启动一个 Synaptics 触摸板的,因为本身 Synaptics 触摸板就是一个 PS/2 兼容设备:
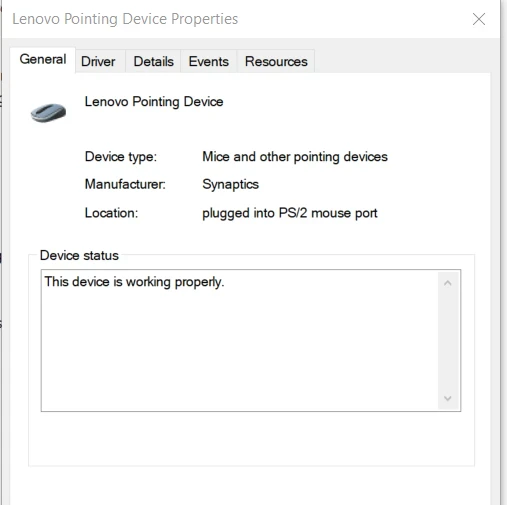
但是恶心的是,明明 PS/2 鼠标有左键右键和滚动的功能,如果在没有驱动的情况下,Synaptics 触摸板就只能上下左右移动和使用鼠标左键,这只能说勉强能用,再多都谈不上了。至于什么双指单击是右键,双指滑动是滚轮,那你是想都别想,根本触发不了。如果要使用多指手势,必须在初始化的时候使用特殊的初始化指令。但是网上的资料非常稀少,经过我不懈的查找,还真让我找到一个完美贴合我的要求的:
https://github.com/delingren/synaptics_touchpad
这个人提交代码的时间差不多和我刚有这个想法的时间差不多,7 月份。这个人实现了一个有线的 Synaptics 触摸板单片机驱动,这下太好了:

那么我们就借着他的程序来说明一下 Synaptics 给 PS/2 加了什么料。
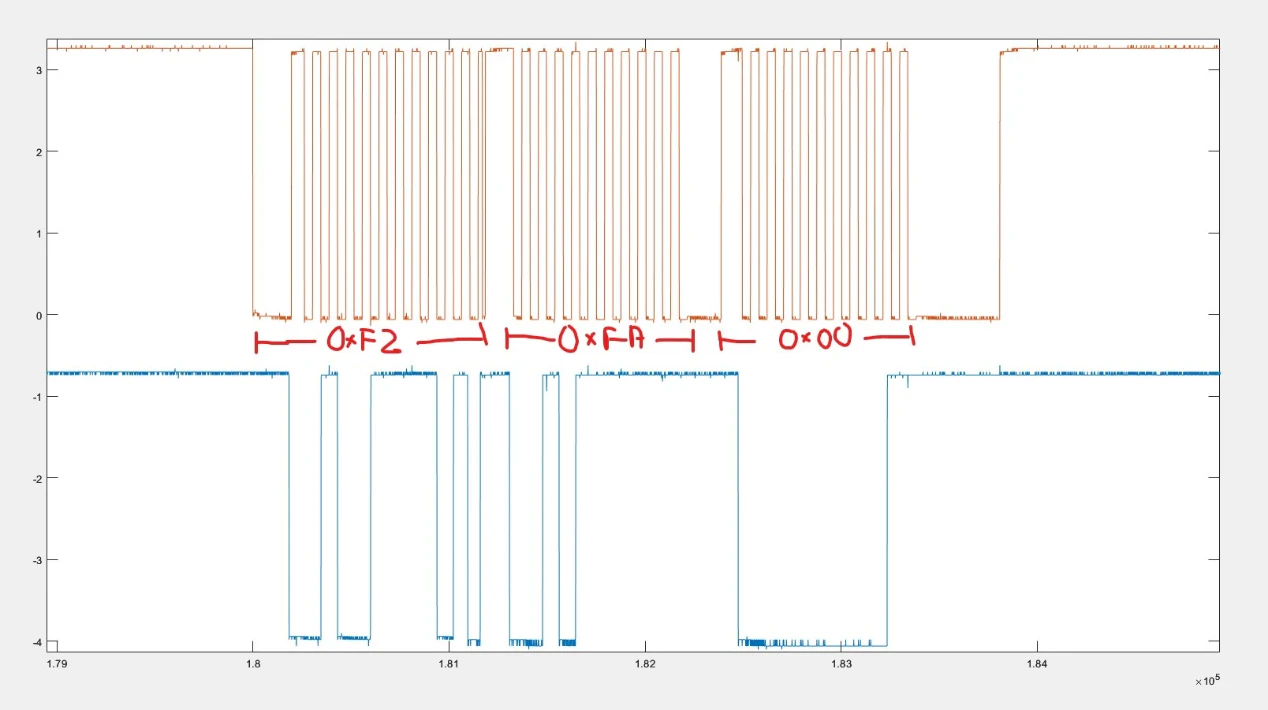
一个标准的 PS/2 的鼠标在 BIOS 启动过程是这样的:主机发出“获取设备 ID”命令 (0xF2) 并等待响应。如果标准 PS/2 鼠标已连接,它将传回一个 ACK(0xFA),并以设备 ID 进行响应 0x00。在这种情况下,主机将识别出鼠标确实是有滚轮并将继续将其视为标准 PS/2 鼠标。
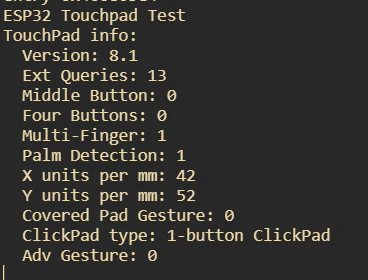
之后,我们需要获取 Synaptics 触摸板的一系列信息以便于下一步的处理:
- 获取版本信息:
- 使用 status_request(0x00, result) 获取触摸板版本信息。
- infoMajor:主版本号,取 result 的低 4 位。
- infoMinor:次版本号,取 result。
- 使用 status_request(0x00, result) 获取触摸板版本信息。
- 获取能力信息:
- 使用 status_request(0x02, result) 获取触摸板的能力信息。
- capExtended:是否支持扩展功能,result 的最高位。
- 如果支持扩展功能,解析:
- nExtendedQueries:扩展查询的数量。
- middleButton:是否支持中键,result 的第 2 位。
- fourButtons:是否支持四个按键,result 的第 3 位。
- multiFinger:是否支持多指,result 的第 1 位。
- palmDetect:是否支持掌心检测,result 的第 0 位。
- 使用 status_request(0x02, result) 获取触摸板的能力信息。
- 获取单位信息:
- 使用 status_request(0x08, result) 获取触摸板的单位信息。
- units_per_mm_x:X 方向每毫米的单位数,result。
- units_per_mm_y:Y 方向每毫米的单位数,result。
- 使用 status_request(0x08, result) 获取触摸板的单位信息。
- 获取点击板信息:
- 使用 status_request(0x0C, result) 获取点击板的类型信息。
- coveredPadGest:是否支持覆盖板手势,result 的最高位。
- clickpad_type:触摸板类型,结合 result 和 result 的位。
- clickPadInfo:触摸板类型的描述数组。
- advGest:是否支持高级手势,result 的第 3 位。
- clearPad:是否支持清除板,result 的第 2 位。
然后就可以配置触摸板的模式了,估计作者也研究了半天怎么给触摸板设置模式,最终他也是选择了参考其他项目初始化触摸板的指令序列:
// 参考资料: 4.3. 模式字节
// 不知为何,我无法让触摸板报告扩展 W 模式数据包。
// 经过研究,我在 VoodooPS2 驱动程序(用于 Hackintosh 的触摸板驱动程序)中找到了解决方案。
// 这个序列设置了绝对模式、高速率、W 模式和 EW 模式。
// F5
// E6, E6, E8, 03, E8, 00, E8, 01, E8, 01, F3, 14
// E6, E6, E8, 00, E8, 00, E8, 00, E8, 03, F3, C8
// F4
在程序中的体现是这样的:
- 两次 SETSCALE11(设置缩放比例为 1:1,0xE6) 命令。
- 发送特殊命令 0xC5。
- 设置采样率为 0x14。
- 再次发送两次 SETSCALE11 命令。
- 发送特殊命令 0x03。
- 设置采样率为 0xC8。
虽然看不太懂,但是确实实现了触摸板的正常使用。具体可以参考 Synaptics 触摸板的文档:touchpad_RevB.pdf,但是我浅读了一下,并没有找到对应的方式。
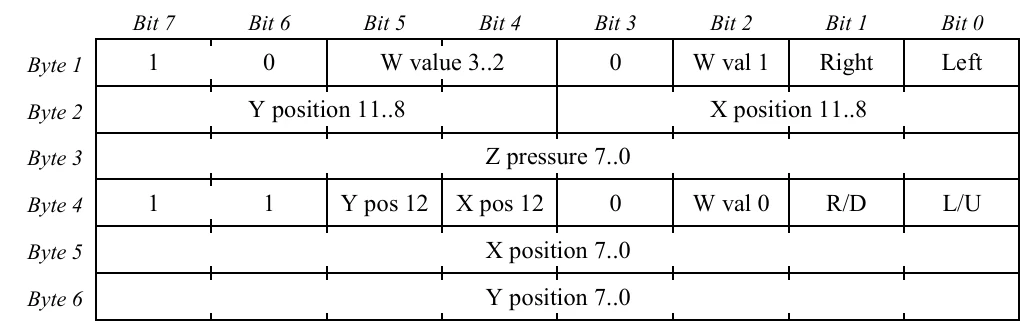
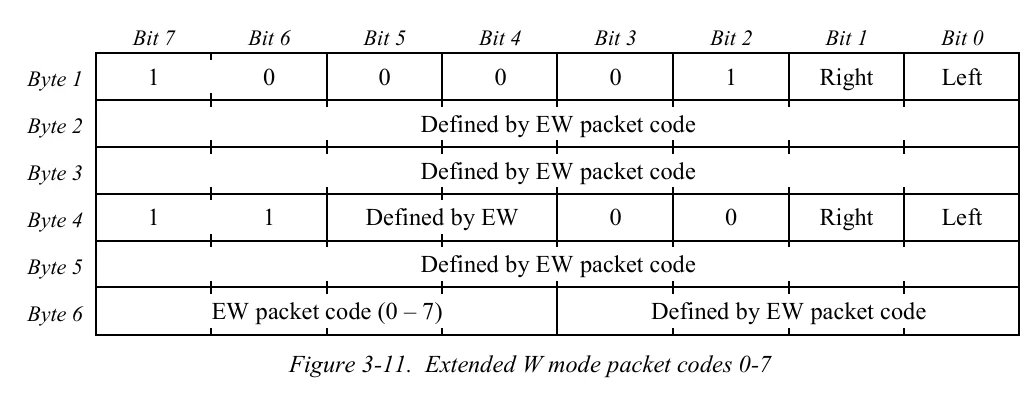
关于 W 模式,文档里是这么说的:
- 当 Wmode 位被设置为 1 时:
- 触摸板不报告手势信息。
- 此时,位 2 自动用于报告 EWmode(Extended W mode,扩展 W 模式)。
- EWmode 提供了扩展的 W 模式功能,在 EW 模式下,传统的 X、Y、Z 数据不再具有之前的含义,而是根据 EW 模式的数据包代码重新定义。
- 当 Wmode 位被设置为 0 时:
- 触摸板报告手势信息。
- 此时,位 2 表示 DisGest(Disable Gesture,禁用手势)。
- 如果 DisGest 位为 0,表示启用点击和滑动手势处理。
- 如果 DisGest 位为 1,表示禁用点击和滑动手势检测。
- 当 DisGest 位为 1 时,在相对模式下,鼠标数据包将报告真实的物理按键状态,而在绝对模式下,数据包的 Gesture 位始终为 0(即不报告手势)。
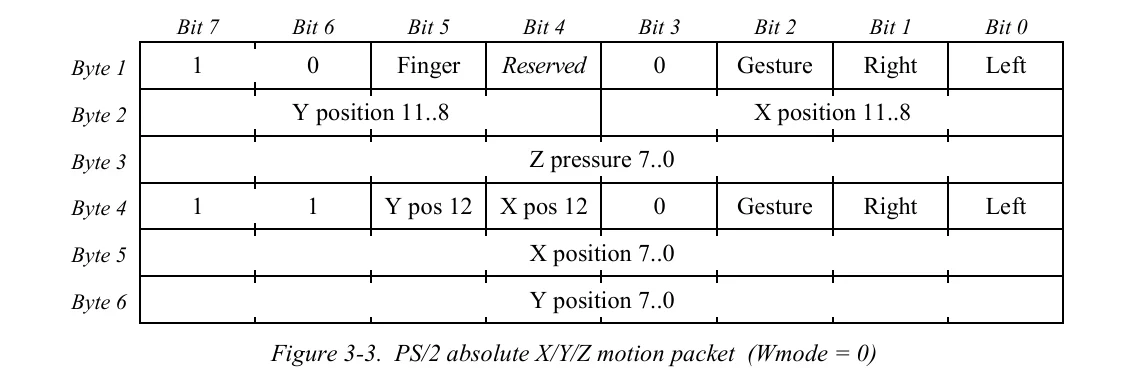
初始化完成后,我们只需要根据 PS/2 设备的信息读取方式对触摸板发送的信息进行处理就行了。触摸板作为一个 PS/2 设备,通过时钟线和数据线与主机进行通信。当触摸板需要发送数据时,会通过时钟线发送同步信号,我们只需要在时钟线的下降沿读取数据线的状态,就能获取到完整的数据包。每个数据包包含 48 位数据,这些数据记录了触摸板上手指的位置、压力、宽度等信息。传回的数据包主要有两种:
- 主要数据包(Primary Packet):用于传输基本的触摸信息,如手指数量、坐标、压力等。
- 第 1 字节(位 47-40):
- 位 47:同步位,一般为 1
- 位 46-44:手指数或其他标志位
- 位 43-40:可能用于按键状态、触摸类型等
- 第 2 字节(位 39-32):
- Z 值,高 8 位,表示压力
- 第 3、4 字节(位 31-16):
- X 坐标,高 16 位
- 第 5、6 字节(位 15-0):
- Y 坐标,高 16 位
- 第 1 字节(位 47-40):
- 扩展数据包(Extended Packet):用于传输更多的细节信息,支持多手指操作、特殊手势等。
- 第 1 字节(位 47-40):
- 特定的标志位,用于区分扩展数据包类型
- 第 2 字节(位 39-32):
- 扩展信息,如功能代码、手指数等
- 剩余字节:
- 根据扩展数据包的类型,包含不同的内容,如额外的坐标、手势信息等
- 第 1 字节(位 47-40):
对于是主要数据包还是扩展数据包,可以看上面说的,检测 w 是 0 还是 1,具体要看 2,4,5,和第 26 位。
蓝牙化
其实蓝牙化特别简单,直接使用 https://github.com/T-vK/ESP32-BLE-Mouse 这个库就可以了。
由于 ESP32 是双核处理器,处理触摸板信息的部分我放在了 0 核上,而通过蓝牙发送信息则是默认在 1 核上运行。我主要使用了 ESP32 自带的 FreeRTOS 中的多任务机制,以实现以下目的:
- 数据处理与任务分离:将触摸板的数据接收和数据处理分离到不同的任务中,提升系统的响应速度和稳定性。
- 异步处理:通过任务和队列,实现数据的异步传递,避免在中断中进行繁重的处理。
由于触摸板通过中断的方式将数据发送给 ESP32。中断服务程序 byte_received 接收到数据后,需要将数据传递给任务进行处理。由于一次只能接收一个字节,需要将连续接收的 6 个字节拼接成一个完整的数据包。当接收到完整的数据包后,使用 xQueueSendFromISR 将数据包发送到 mouseEventQueue 队列中。
之后在处理程序中,使用 xQueueReceive 从队列中接收数据包,超时时间为 10 毫秒。根据数据包内容,判断其类型,并调用相应的解析函数。如果蓝牙已经连接,则将鼠标事件通过 蓝牙发送出去。这样就实现了数据的蓝牙化。
实现复杂手势以及优化
关于数据包
根据要求连接触摸板后,每当触摸时触摸板会向主机发送 6 字节的数据包。这些数据包包含手指位置、压力(此触摸板的压力值报告的是触摸面积)、宽度等信息。TM2334 这款触摸板最大只能检测出 3 个手指,所以超过三指的手势无法
由于通信不可避免地会出现噪声,数据包可能会丢失或被更改。并且捕捉每一个数据帧并不是非常关键,丢个一两帧问题也不大。同时一些数据包具有独特的特征(例如,某些位置的固定位),可以用作同步和恢复数据包。因此,如果接收到意外的数据包,我会继续丢弃数据包,直到重新同步。简单说就是校验数据包的第 0 和第 24 个字节,确保第 0 个字节的第 7 位为 1,第 6 位和第 3 位为 0;确保第 24 个字节的第 7 位和第 6 位为 1,第 3 位为 0。具体为什么,我是从 VooDooPS2 驱动中抄的,为什么并不是很清楚,我也不是很想仔细读文档找到为什么,大概知道有这么回事就行了。
想要实现的功能
我主要想实现下面的功能,其实下面的功能实现之后,日常用就一点问题没有了:
- 鼠标移动
- 按动左下角的区域作为鼠标左键,按动右下角的区域作为鼠标右键(封壳之后再实现,目前按起来比较困难)
- 轻触作为点击
- 单指轻触作为鼠标左键
- 两指轻触作为鼠标右键
- 三指轻触作为鼠标中键
- 屏蔽手掌误触
- 滚动
- 两指上下滑动来作为垂直方向的滚动
- 两指左右滑动来作为水平方向的滚动
- 三指手势
- 三指左右移动来切换应用
- 三指上下移动来显示桌面或回到应用
- 轻触一下,然后移动手指来实现拖拽
- 放大和缩小
- 休眠模式
其中三指手势并不是 HID 设备原生支持的,可能要参考微软的文档(切换应用估计到时候用键盘发送 Alt + Tap,然后再发上下左右实现;显示桌面和),这个再说,主要说说其他的功能。
实际实现
如果我们在每一帧中忠实地报告手指位置,光标会因为人类手指固有的噪声和不稳定性而出现很多抖动。为了解决这个问题,可以通过下面的一些优化方案来实现:
- 平均化:我不在每一帧中报告手指的位置,而是跟踪最近 n 帧的平均值,以消除突发的移动,目前我设置的是 20 帧,这个值越低精度越高,光标也有可能越抖。
- 噪声阈值:如果两帧之间的增量低于某个阈值,则认为是误触。这个数值是经验性的,需要通过多次实验来找到,而且触摸板不同,使用的值也不太一样,目前我设置的值是 0.08mm。
- 通过阈值把手粘住:当手指保持静止时,我们使用更高的阈值,使其在开始时更“粘”,但在移动时更平滑。
对于滚动,由于 HID 协议报告的时候使用的是整数,即使轻轻划一下也只能报告 1,而不能报告小数,所以需要通过一种方式实现快速和精准的滚动,其实很简单:当手指移动缓慢且幅度较小时,我只在每几帧中生成一个报告,移动量为 1。一旦速度超过某个阈值,我就假设用户的意图是快速滚动大范围。在这种情况下,我会在每一帧中报告,且移动量与实际移动成正比。
对于轻触作为点击,实现逻辑是这样的:当检测到手指刚刚按下时(上一帧手指个数为 0,当前帧手指个数不为 0),记录按下的帧号以及按下了几个手指,因为有可能触摸板反应速度太快而导致实际按下了三个手指,但是刚开始的时候只识别到了一个,所以在后面的处理中需要记录按下手指的最高数量。最后,当手指移开的时候(上一帧手指个数不为 0,当前帧手指个数为 0),检查在这个过程中手指的移动距离、按动时间、接触的宽度是不是小于一个阈值,如果都满足才触发。这样就可以避免异物或者手掌误触到触摸板导致误触发。
轻触之后移动作为拖动这个功能也不难,其实就是单指点击之后在一个阈值内滑动就是拖动。只不过要注意这个应该是先通过左键按下,然后移动光标,最后左键松开来实现的。
目前基本已经可以作为正常的日常使用了,也就是说,只要 16 块钱买个触摸板,20 块钱买片 ESP32,加上外围电路不超过 50 就能实现低成本的蓝牙触摸板。